1.1 產(chǎn)品簡介
Magpilot 電磁定位系統(tǒng)是一款基于電磁感應(yīng)原理的高精度磁場空間定位系統(tǒng),它能夠精 確計算傳感器在特定空間內(nèi)的位置和姿態(tài)角度。該系統(tǒng)通常將傳感器與醫(yī)療器械集成到一 起,以便實時監(jiān)測目標(biāo)點的空間位置和角度變化。 系統(tǒng)主要構(gòu)成包括:系統(tǒng)控制單元、傳感器交互單元、磁場發(fā)生器、傳感器或傳感器集 成工具以及上位機,電磁定位系統(tǒng)示意圖如圖 1.1 所示: 圖 1.1 電磁定位系統(tǒng)示意圖 序號 名稱 描述 備注 ① FG 內(nèi)置發(fā)射線圈 請勿貼近 ② SCU 作為系統(tǒng)的指揮核心, 負責(zé)協(xié)調(diào)各模塊 間的交互 ③ SIU SCU 與 Sensor 的交互媒介 ④ Sensor 采集空間磁場信息 請勿彎曲 ⑤ 上位機 與用戶實際應(yīng)用場景結(jié)合的軟件 表 1.1 系統(tǒng)模塊說明
1.2 產(chǎn)品模塊介紹
系統(tǒng)控制單元(SCU)給磁場發(fā)生器(FG)提供功率使 FG 產(chǎn)生變化的磁場。 通常被集成在工具上的傳感器連接到傳感器交互單元(SIU)上,然后 SIU 又被連接到 SCU。如果傳感器被置于追蹤范圍內(nèi),就會在傳感器產(chǎn)生由磁場發(fā)生器激勵的感生電動勢。 該感生電動勢的特性是由傳感器的位置和姿態(tài)角以及變化的磁場強度和相位決定的。 SIU 將感生電動勢信號轉(zhuǎn)換為數(shù)字信號傳送至 SCU,SCU 將這些數(shù)字信號和其他參數(shù)構(gòu) 成的數(shù)據(jù)進行分析,求解出傳感器的位置和姿態(tài)角度,最后把這些位姿信息傳給上位機。 Magpilot EP-M510 電磁定位系統(tǒng)使用說明書 3
1.2.1 系統(tǒng)控制模塊(SCU)
系統(tǒng)控制單元(System Control Unit)控制著整個系統(tǒng)的運行,它扮演系統(tǒng)各個模塊的交 互中心并給用戶提供可視的狀態(tài)指示。其主要功能如下: 1. 為磁場發(fā)生器提供功率并控制磁場產(chǎn)生器的磁場輸出; 2. 通過 SIU 收集傳感器數(shù)據(jù)從而計算傳感器的位姿,然后把位置和角度信息發(fā)送給上 位機; 3. 和上位機進行交互; 圖 1.2 系統(tǒng)控制模塊正面接口說明 ①指示燈 ②接口 ③SCU 與 SIU 接口 1 ④SCU 與 SIU 接口 2 圖 1.3 系統(tǒng)控制模塊背面接口說明 ①開關(guān) ②電源接口 ③網(wǎng)口(預(yù)留/暫未開放) ④USB Type-B ⑤拓展串口 SCU 尺寸 216mm* 170mm* 90mm(長*寬*高) 重量 1.8KG±0.1KG 輸入電壓 28V 可支持 SIU 數(shù)量 2 與上位機交互接口 USB、網(wǎng)口(暫未開放) 指示燈 黃燈:系統(tǒng)正在初始化 綠燈: 系統(tǒng)正常工作 紅燈:系統(tǒng)工作環(huán)境(FG 溫度)異常或未接入 FG 表 1.2 SCU 參數(shù) ① ② ③ ④ ① ③ ④ ② ⑤ Magpilot EP-M510 電磁定位系統(tǒng)使用說明書 4
1.2.2 傳感器交互單元(SIU)
傳感器交互單元(Signal Interface Unit)是傳感器與系統(tǒng)控制模塊的交互媒介,其主要功 能如下: 1. 將傳感器產(chǎn)生的模擬信號轉(zhuǎn)化為數(shù)字信號; 2. 將這些數(shù)字信號發(fā)送給 SCU 進行處理; 3. 增加傳感器與 SCU 的操作距離,避免過長的傳感器/工具線纜,保證笨重的系 統(tǒng)模塊遠離操作區(qū)域; 盡管用于傳輸模擬信號的傳感器線纜已經(jīng)被恰當(dāng)屏蔽(如果使用了 Aimooe 提供的工具 線纜),但是還是非常容易收到噪聲干擾,所以工具線纜越短,越容易避免噪聲的干擾。 標(biāo)準(zhǔn)的 SIU 模塊可以支持至多八個 5 自由度傳感器或四個 6 自由度傳感器(或者結(jié)合)。 圖 1.4 SIU 正面接口說明 ①端口指示燈 ②系統(tǒng)指示燈 ③傳感器接口 圖 1.5 SIU 與 SCU 接口 SIU 尺寸 170mm * 118mm * 70mm(長*寬*高) 重量 0.66KG±0.1KG 可支持傳感器數(shù)量 8 個 5DOF 傳感器 / 4 個 6DOF 傳感器 系統(tǒng)指示燈 綠燈:正常工作 不亮燈:未上電 端口指示燈 綠燈:端口被接入 不亮燈:端口未被接入 表 1.3 SIU 參數(shù)信息 ① ② ③ ① Magpilot EP-M510 電磁定位系統(tǒng)使用說明書 5
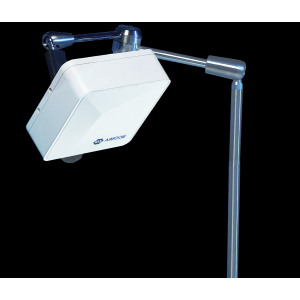
1.2.3 磁場發(fā)生器 (FG)
圖 1.6 FG ①SCU 連接線 ②支架固定孔 ③FG 正面 ④固定孔位 ⑤ 磁場發(fā)生器連接器 零件設(shè)計 描述 磁場發(fā)生器線纜 用于連接磁場發(fā)生器與 SCU 的線纜,長度 4.5m 固定點 用來連接固定支架,M12 FG 正面 跟蹤范圍的原點位于磁場發(fā)生器的正面,可追蹤區(qū)域位于正面 這一側(cè),磁場發(fā)生器的類型標(biāo)簽貼在背面 固定孔位 共有四個固定孔位,左右兩側(cè)各兩個。固定孔類型為 M8(螺距 1.25mm,深度 13mm),可以通過側(cè)面固定孔位將磁場發(fā)生器固 定于特定裝置 磁場發(fā)生器連接器 將磁場發(fā)生器與 SCU 相連,發(fā)生器為 19 引腳圓形金屬連接器 表 1.4 FG 參數(shù)信息說明 注意: 使用時務(wù)必先連接磁場發(fā)生器 FG,再接通 SCU 電源; 設(shè)備通電狀態(tài)下請勿插拔磁場發(fā)生器,否則可能永久損壞磁場發(fā)生器且磁場發(fā)生器放 電可能會擊傷操作人員。
1.2.4 傳感器
傳感器專為需要小型化傳感器的場合設(shè)計,能夠提供六自由度(6DOF)或 5 自由 度(5DOF)的空間定位和方向信息,包括 x、y、z 三個坐標(biāo)軸的位置和俯仰角、偏航 角、滾動角三個方向角。傳感器被完全封裝在一層薄的黑色聚酰亞胺(PI)管中使得 傳感器具有很高的穩(wěn)定性。 5DOF 標(biāo)準(zhǔn)款傳感器 最大直徑 0.45mm 最大長度 8mm 雙絞線 總長 2 m 單股線徑 0.1mm 表 1.5 5DOF 標(biāo)準(zhǔn)款尺寸信息 ① ② ③ ④ ⑤ Magpilot EP-M510 電磁定位系統(tǒng)使用說明書 6 5DOF mini 款傳感器 最大直徑 0.45mm 最大長度 5mm 雙絞線 總長 3 m 單股線徑 0.1mm 表 1.6 5DOFmini 款尺寸信息 傳感器安裝與使用指南: 連接傳感器之前,請閱讀一下內(nèi)容: 在處理和安裝傳感器時,請小心操作,以避免對傳感器、電纜和引線末端造 成任何損壞。 請勿對傳感器施加機械應(yīng)力,尤其是不要彎曲傳感器的剛性部分。 確保傳感器牢固地安裝在工具內(nèi),以保證工具的精度。如果傳感器安裝不當(dāng) 或偏離位置,可能會影響工具的性能。 確保傳感器與所有金屬或?qū)щ姴牧媳3蛛姎飧綦x,以防止電氣干擾或損壞。 設(shè)計工具主體時請考慮傳感器的防潮需求,確保傳感器不會暴露在濕氣中。
1.3 產(chǎn)品參數(shù) 性能
定位精度 300*300*300mm 3 mm(RMS mm) 最大采樣頻率 30Hz 系統(tǒng)工作溫度 10~40 ℃ 系統(tǒng)預(yù)熱時間 ≤3min 儲存(運輸)溫度 -10~50℃ 追蹤域 300mm*300mm*300mm 見圖 4.2 數(shù)據(jù) 通信 方式 數(shù)據(jù)接口 USB 2.0(網(wǎng)口、串口通訊暫未開放) 工具 軟件自動識別 表 1.7 產(chǎn)品參數(shù)
1.4 產(chǎn)品特性
1) 基于 FPGA 技術(shù); 2) 具有可靠的追蹤精度; 3) 良好的抗干擾能力;


絡(luò)警察")


絡(luò)110")
 在線客服
在線客服
 企業(yè)微信
企業(yè)微信